最近浙江大学流体动力与机电系统国家重点实验室发了篇重磅综述《A Comprehensive Review of Humanoid Robots》,把人形机器人技术扒了个底朝天。看完最大的感受是:这玩意儿比我想象的复杂多了——既要像人一样动,还要像人一样"思考",甚至像人一样"有情绪"。今天咱们就用大白话聊聊,人形机器人是怎么从1969年那个只会"挪步"的铁疙瘩,进化到现在能跑酷、会打乒乓球的"全能选手"的。
先看张全家福:人形机器人到底由啥组成?
要理解人形机器人有多难,先得知道它是个多复杂的"系统工程"。浙大论文里画了个系统组成图,一目了然:机械结构、动力系统、算法和传感器四大块,缺一块都玩不转。
你看,光机械结构就分手臂、头部、腿部,每个部位都得有"关节"——就像人的肩肘腕髋膝踝,少一个自由度,动作就僵硬。动力系统更麻烦,伺服电机要精确到0.1度的转动,液压系统要扛住几十公斤的重量还得灵活。最头疼的是算法,你让机器人"递杯水",它得先"看见"杯子(环境感知),规划怎么过去(导航),控制手臂不抖(运动控制),还得知道杯子烫不烫(触觉传感器)。
50年进化史:从"瘸子"到"跑酷高手"的逆袭
说出来你可能不信,人形机器人这50多年走的弯路,比我代码里的bug还多。
国际玩家:从ASIMO到Atlas的"炫技大赛"
1969年日本早稻田大学搞出第一个双足机器人,结果只能"静态行走"——走一步停半天,跟老爷爷拄拐杖似的。真正让大家觉得"有戏"的是本田ASIMO,2000年那会儿它就能跑9公里/小时,还会踢球、拧瓶盖。可惜2018年本田宣布项目终止,为啥?太贵了!据说一台ASIMO成本上亿,根本没法量产。
波士顿动力的Atlas是现在的"顶流"。2013年初代还是个"液压怪兽",噪音大得像打桩机;2024年最新电动版直接封神——360度旋转关节、跑酷空翻、甚至能在野外泥地里蹦跶。我看完它的视频就在想:这玩意儿要是装个AI大脑,是不是能直接参加奥运会?
特斯拉Optimus走的是另一条路。2022年初代还在"顺拐",2023年Gen2就稳多了,关键是特斯拉想把它当"工业品"造——用汽车生产线量产,成本压到2万美元以内。说实话,这思路比波士顿动力靠谱,毕竟再牛的技术,造不出来也是白搭。
中国选手:从"跟跑"到"并跑"
咱们起步不算早,90年代才开始,但进步是真快。北京理工大学2001年的"汇童"机器人,已经能独立行走,后来还学会了打太极拳、防跌倒。浙大的"悟空"更绝,直接挑战高难度——打乒乓球!"悟空IV"时速超6公里,能跳0.5米高,爬25度斜坡,泥地草地都能走,算是把"运动能力"点满了。
企业这边也热闹。优必选Walker系列迭代了好几代,宇树科技2024年发的G1,据说成本能控制在10万人民币以内。小米、小鹏这些公司也下场了,看来人形机器人这波浪潮,中国企业不想错过。
技术拆解:为啥造个"像人"的机器人这么难?
头部:不只是"脸",更是"社交名片"
你可能觉得机器人头部就是个"显示屏",但浙大论文里专门花了大篇幅讲这个——因为它直接关系到"你愿不愿意让机器人进家门"。
现在头部设计分两派:一派是"非拟人化",比如波士顿动力Electric Atlas,就一个带光环的显示屏,简单粗暴但实用;另一派是"拟人化",追求越像人越好,比如Ameca机器人,皮肤用Frubber材料(海绵状人造橡胶),能做出皱眉、微笑的微表情。
但这里有个坑——“恐怖谷效应”。简单说就是机器人长得太像人但又不完全像,反而让人觉得诡异。所以现在很多设计走"卡通化"路线,比如优必选Walker X,眼睛大大的,表情萌萌的,既亲切又不会让人不舒服。
头部技术已经发展到"心理拟人化"阶段了——不只是表情像人,还得有"情绪"。比如Emo机器人用深度学习模型预测人类表情,你笑它也笑,你皱眉它会"关心"你。说实话,这要是再配上ChatGPT的对话能力,以后心理咨询师会不会失业?
硬件架构:机器人的"肌肉"和"感官"
光有脸不行,还得有"身体"。浙大论文里的硬件架构图把这事儿说透了:机械结构是"骨骼",传感器是"五官",动力系统是"肌肉"。
机械结构最讲究"轻量化"和"刚性"的平衡。比如宇树G1用了航空铝和碳纤维,全身重量压到55公斤,跟成年人差不多,但关节强度得扛住跳跃落地的冲击力。传感器现在流行"多模态融合"——激光雷达(看远距离)+ RGB-D相机(看颜色和深度)+ 触觉传感器(摸软硬)+ IMU(测姿态)。就像人用眼睛、手、耳朵一起感知世界,机器人也得"多感官协作"才靠谱。
动力系统现在有三大流派:伺服电机(精度高但力小)、液压(力大但笨重)、气动(灵活但精度低)。波士顿动力早期用液压,现在Atlas换成电动伺服,就是为了轻便和安静。特斯拉Optimus更绝,直接用汽车电机技术下放,成本一下子降下来了。
软件架构:机器人的"大脑"怎么思考?
硬件是"身体",软件才是"灵魂"。浙大论文里的软件架构图,看着像个复杂的"俄罗斯套娃"——实时操作系统(RTOS)管底层运动,ROS(机器人操作系统)管传感器和算法,EtherCAT通信协议保证数据传输不延迟。
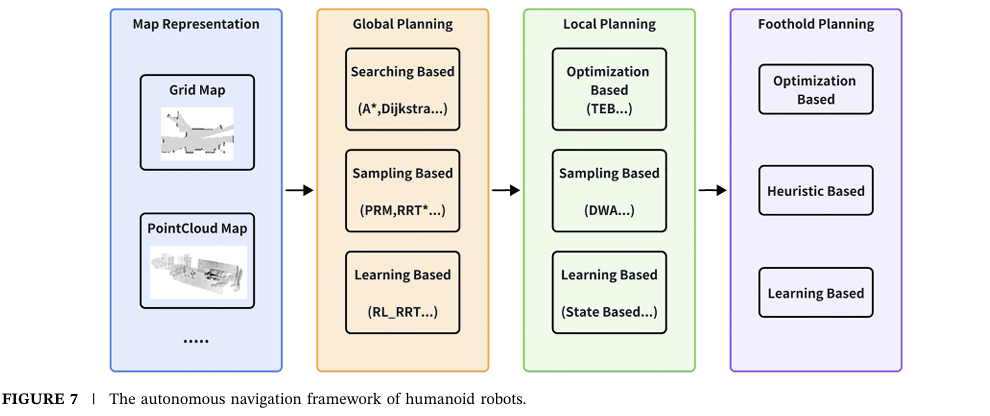
最核心的是环境感知和自主导航。你让机器人去厨房拿瓶水,它得先"看懂"厨房的布局(地图构建),避开地上的拖鞋(动态障碍物),规划出一条路(路径规划),再控制腿迈步(脚步规划)。这里面每个环节都是坑:光线暗了相机识别不准,地面滑了容易摔跤,拖鞋被踢了位置变了还得重新规划。
运动控制更是"玄学"。早期用"零力矩点(ZMP)“理论,保证机器人走路时重心在支撑面内,就像人走路不会倒。现在流行"模型预测控制(MPC)”,说白了就是"边走边算"——每走一步预测下一步的姿态,随时调整。波士顿动力Atlas跑酷时,身体扭来扭去就是MPC在实时纠错。
最近火起来的"具身智能",就是让机器人用LLM(大语言模型)做"任务规划"。比如你说"帮我热一下咖啡",LLM会拆解成:1. 找到微波炉 2. 打开微波炉门 3. 把咖啡放进去 4. 设置加热时间 5. 启动。再把这些步骤翻译成机器人能执行的动作指令。Figure 01和OpenAI合作后,据说已经能听懂复杂指令了,这才是"智能助手"该有的样子。
现在的问题:离"走进家庭"还有多远?
浙大论文最后总结了几个"卡脖子"的难题,我觉得说得挺实在:
- 成本太高:Atlas这种顶级机器人成本上亿,宇树G1降到10万,但还是比扫地机器人贵100倍。
- 续航太短:现在主流电池续航就1-2小时,干不了啥就没电了,总不能拖着电源线走吧?
- 鲁棒性差:实验室里好好的,换个环境(比如地毯毛长了、地板有水)就可能摔跤。
- 安全问题:万一机器人失控撞了老人小孩咋办?现在还没靠谱的安全标准。
不过趋势是好的:模块化设计(零件坏了能换)、标准化接口(不同品牌零件通用)、AI大模型加持(更聪明)。特斯拉说要2025年量产Optimus,目标价2万美元,我觉得有点乐观,但5年内家用机器人进中产家庭,应该不是梦。
最后说两句
看完浙大这篇综述,我最大的感受是:人形机器人不再是科幻片里的玩意儿了。从机械结构到AI大脑,每个技术模块都在快速突破。当然,现在还没到"机器人管家"的阶段,但就像10年前智能手机刚出来时谁也想不到现在的功能一样,人形机器人的爆发可能比我们想象的快。
你觉得5年后家里会有机器人帮忙做饭、打扫卫生吗?反正我挺期待的——到时候我就能彻底告别洗碗了!(前提是它别把我珍藏的碗摔了)
论文原文链接:https://onlinelibrary.wiley.com/doi/10.1002/smb2.12008(感兴趣的技术党可以自己去啃,友情提示:有点厚)# 从"走路都难"到"跑酷跳舞":浙大最新综述拆解人形机器人50年技术突围
最近浙江大学流体动力与机电系统国家重点实验室发了篇重磅综述《A Comprehensive Review of Humanoid Robots》,把人形机器人技术扒了个底朝天。看完最大的感受是:这玩意儿比我代码里的bug还多——既要像人一样动,还要像人一样"思考",甚至像人一样"有情绪"。今天就用大白话聊聊,人形机器人是怎么从1969年那个只会"挪步"的铁疙瘩,进化到现在能跑酷、会打乒乓球的"全能选手"的。
先看张全家福:人形机器人到底由啥组成?
要理解人形机器人有多难,先得知道它是个多复杂的"系统工程"。浙大论文里这张系统组成图就很直观,机械结构、动力系统、算法和传感器四大块,缺一块都玩不转。
你看,光机械结构就分手臂、头部、腿部,每个部位都得有"关节"——就像人的肩肘腕髋膝踝,少一个自由度,动作就僵硬得像僵尸。动力系统更麻烦,伺服电机要精确到0.1度的转动,液压系统要扛住几十公斤的重量还得灵活。最头疼的是算法,你让机器人"递杯水",它得先"看见"杯子(环境感知),规划怎么过去(导航),控制手臂不抖(运动控制),还得知道杯子烫不烫(触觉传感器)。这一套下来,比我写个分布式系统还复杂。
50年进化史:从"瘸子"到"跑酷高手"的逆袭
说出来你可能不信,人形机器人这50多年走的弯路,比我代码里的bug还多。
国际玩家:从ASIMO到Atlas的"炫技大赛"
1969年日本早稻田大学搞出第一个双足机器人,结果只能"静态行走"——走一步停半天,跟老爷爷拄拐杖似的。真正让大家觉得"有戏"的是本田ASIMO,2000年那会儿它就能跑9公里/小时,还会踢球、拧瓶盖。可惜2018年本田宣布项目终止,为啥?太贵了!据说一台ASIMO成本上亿,根本没法量产,活生生把本田造穷了。
波士顿动力的Atlas是现在的"顶流"。2013年初代还是个"液压怪兽",噪音大得像打桩机;2024年最新电动版直接封神——360度旋转关节、跑酷空翻、甚至能在野外泥地里蹦跶。我看完它的视频就在想:这玩意儿要是装个AI大脑,是不是能直接参加奥运会?
特斯拉Optimus走的是另一条路。2022年初代还在"顺拐",2023年Gen2就稳多了,关键是特斯拉想把它当"工业品"造——用汽车生产线量产,成本压到2万美元以内。说实话,这思路比波士顿动力靠谱,毕竟再牛的技术,造不出来也是白搭。
中国选手:从"跟跑"到"并跑"
咱们起步不算早,90年代才开始,但进步是真快。北京理工大学2001年的"汇童"机器人,已经能独立行走,后来还学会了打太极拳、防跌倒。浙大的"悟空"更绝,直接挑战高难度——打乒乓球!"悟空IV"时速超6公里,能跳0.5米高,爬25度斜坡,泥地草地都能走,算是把"运动能力"点满了。
企业这边也热闹。优必选Walker系列迭代了好几代,宇树科技2024年发的G1,据说成本能控制在10万人民币以内。小米、小鹏这些公司也下场了,看来人形机器人这波浪潮,中国企业不想错过。
技术拆解:为啥造个"像人"的机器人这么难?
头部:不只是"脸",更是"社交名片"
你可能觉得机器人头部就是个"显示屏",但浙大论文里专门花了大篇幅讲这个——因为它直接关系到"你愿不愿意让机器人进家门"。
现在头部设计分两派:一派是"非拟人化",比如波士顿动力Electric Atlas,就一个带光环的显示屏,简单粗暴但实用;另一派是"拟人化",追求越像人越好,比如Ameca机器人,皮肤用Frubber材料(海绵状人造橡胶),能做出皱眉、微笑的微表情。
但这里有个坑——“恐怖谷效应”。简单说就是机器人长得太像人但又不完全像,反而让人觉得诡异。所以现在很多设计走"卡通化"路线,比如优必选Walker X,眼睛大大的,表情萌萌的,既亲切又不会让人不舒服。
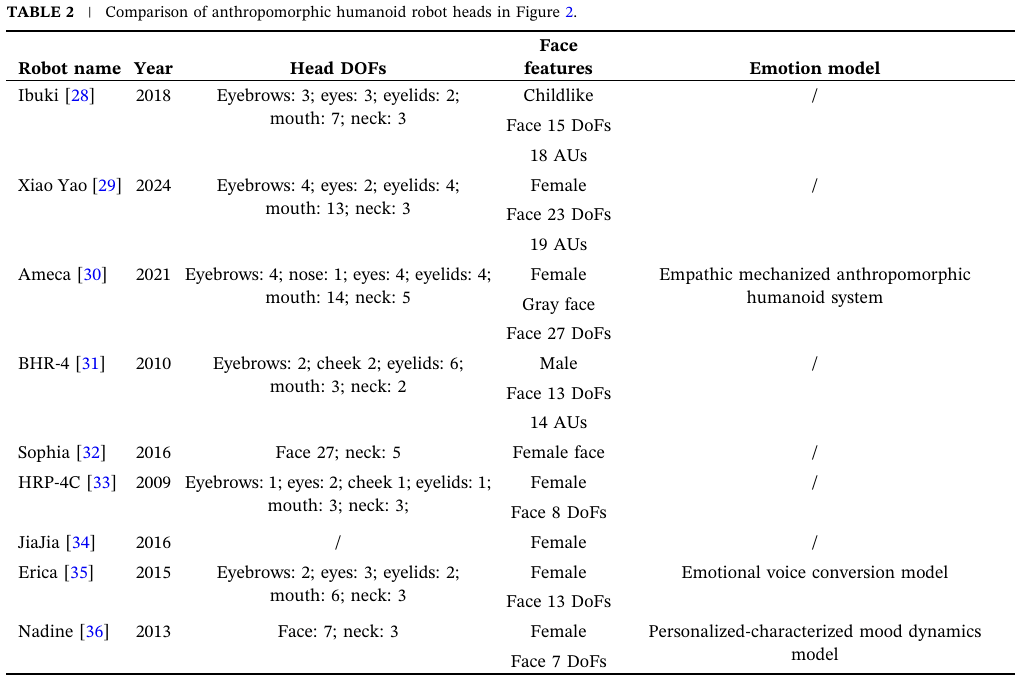
看这表格里的数据,Ibuki机器人头部有22个自由度,比人类面部肌肉还复杂,但表情反而不如只有12个自由度的Xiao Yao自然。说白了,不是自由度越多越好,关键是"仿生度"——怎么让机器人的眼神、嘴角动作符合人类习惯,这才是难点。
现在头部技术已经发展到"心理拟人化"阶段了——不只是表情像人,还得有"情绪"。比如Emo机器人用深度学习模型预测人类表情,你笑它也笑,你皱眉它会"关心"你。说实话,这要是再配上ChatGPT的对话能力,以后心理咨询师会不会失业?
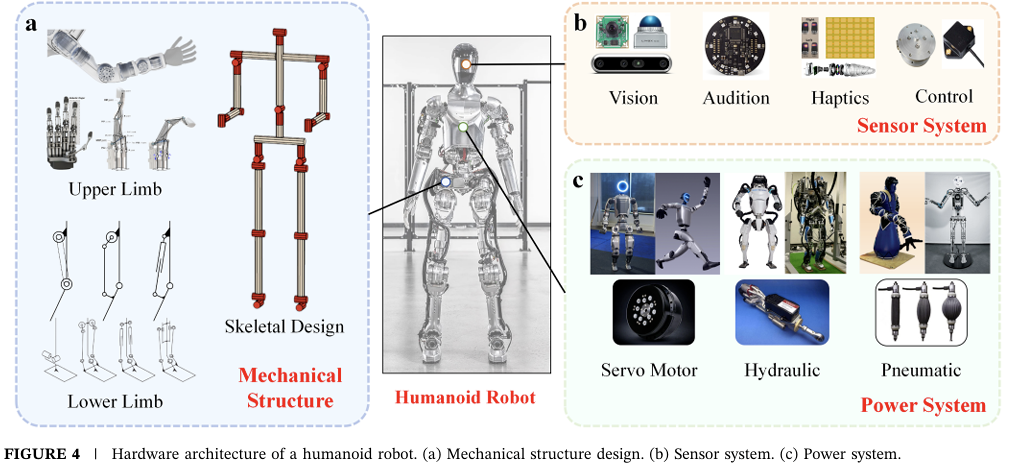
硬件架构:机器人的"肌肉"和"感官"
光有脸不行,还得有"身体"。浙大论文里的硬件架构图,把这事儿说透了:机械结构是"骨骼",传感器是"五官",动力系统是"肌肉"。
机械结构最讲究"轻量化"和"刚性"的平衡。比如宇树G1用了航空铝和碳纤维,全身重量压到55公斤,跟成年人差不多,但关节强度得扛住跳跃落地的冲击力。这就像造赛车,既要轻又要结实,成本自然下不来。
传感器现在流行"多模态融合"——激光雷达(看远距离)+ RGB-D相机(看颜色和深度)+ 触觉传感器(摸软硬)+ IMU(测姿态)。就像人用眼睛、手、耳朵一起感知世界,机器人也得"多感官协作"才靠谱。我试过用单目相机让机器人定位,结果光照一变就漂移,还是得多传感器融合才稳。
动力系统现在有三大流派:伺服电机(精度高但力小)、液压(力大但笨重)、气动(灵活但精度低)。波士顿动力早期用液压,现在Atlas换成电动伺服,就是为了轻便和安静。特斯拉Optimus更绝,直接用汽车电机技术下放,成本一下子降下来了。
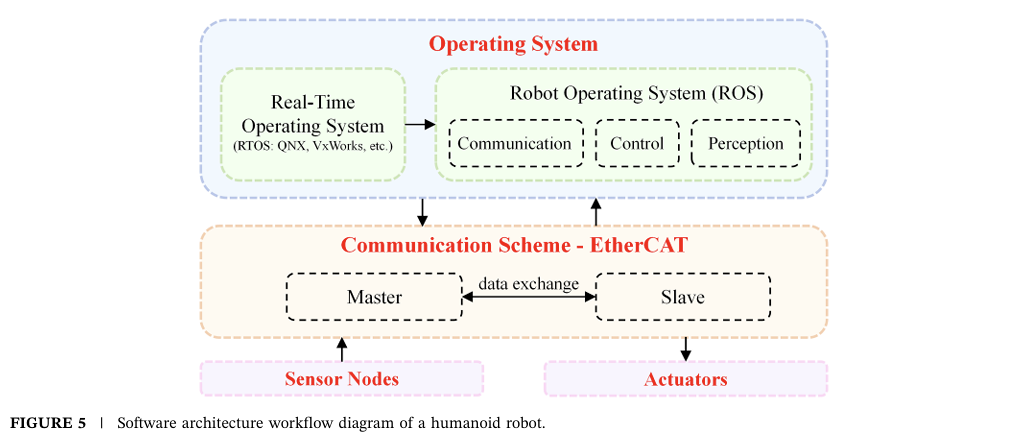
软件架构:机器人的"大脑"怎么思考?
硬件是"身体",软件才是"灵魂"。浙大论文里的软件架构图,看着像个复杂的"俄罗斯套娃"——实时操作系统(RTOS)管底层运动,ROS(机器人操作系统)管传感器和算法,EtherCAT通信协议保证数据传输不延迟。
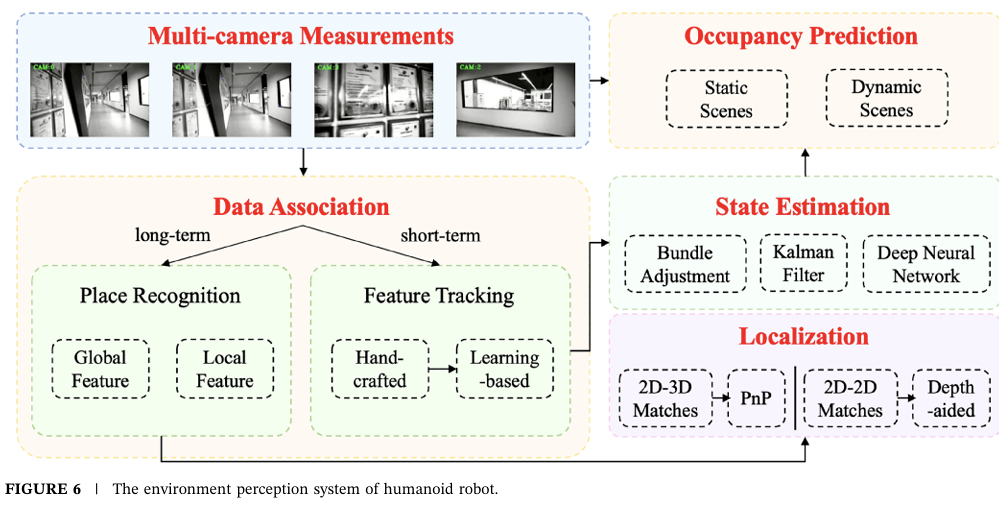
最核心的是环境感知和自主导航。你让机器人去厨房拿瓶水,它得先"看懂"厨房的布局(地图构建),避开地上的拖鞋(动态障碍物),规划出一条路(路径规划),再控制腿迈步(脚步规划)。这里面每个环节都是坑:光线暗了相机识别不准,地面滑了容易摔跤,拖鞋被踢了位置变了还得重新规划。
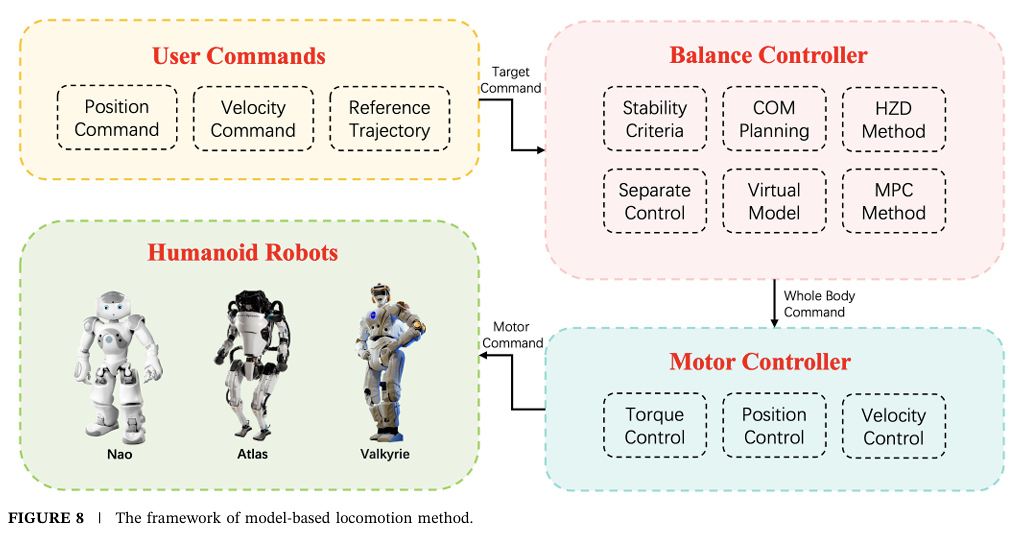
运动控制更是"玄学"。早期用"零力矩点(ZMP)“理论,保证机器人走路时重心在支撑面内,就像人走路不会倒。现在流行"模型预测控制(MPC)”,说白了就是"边走边算"——每走一步预测下一步的姿态,随时调整。波士顿动力Atlas跑酷时,身体扭来扭去就是MPC在实时纠错,这算法复杂度,比我写的路径规划器高10个level。
最近火起来的"具身智能",就是让机器人用LLM(大语言模型)做"任务规划"。比如你说"帮我热一下咖啡",LLM会拆解成:1. 找到微波炉 2. 打开微波炉门 3. 把咖啡放进去 4. 设置加热时间 5. 启动。再把这些步骤翻译成机器人能执行的动作指令。Figure 01和OpenAI合作后,据说已经能听懂复杂指令了,这才是"智能助手"该有的样子。
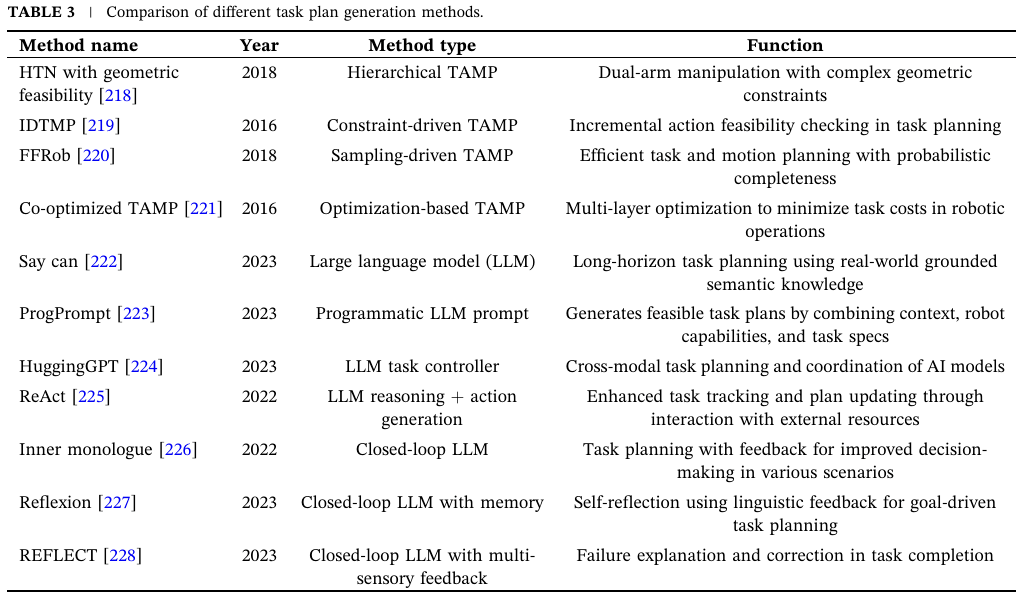
看这表格里的任务规划方法,从早期的HTN(层次化任务网络)到现在的SayCan(LLM+机器人API),越来越像人类"思考"方式了。不过我觉得最牛的是"闭环LLM",机器人做完一步会"反思"对不对,错了还能自己修正——这不就是我写代码debug的过程吗?
现在的问题:离"走进家庭"还有多远?
浙大论文最后总结了几个"卡脖子"的难题,我觉得说得挺实在:
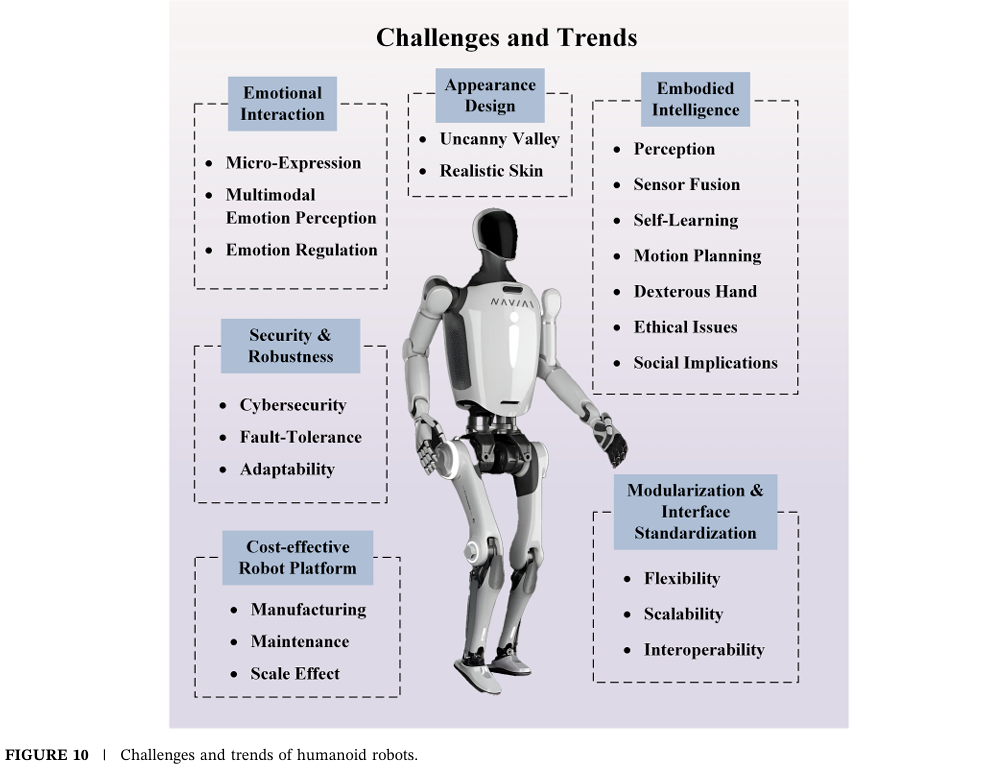
- 成本太高:Atlas这种顶级机器人成本上亿,宇树G1降到10万,但还是比扫地机器人贵100倍。什么时候降到1万以内,才可能普及。
- 续航太短:现在主流电池续航就1-2小时,干不了啥就没电了,总不能拖着电源线走吧?得等固态电池技术突破。
- 鲁棒性差:实验室里好好的,换个环境(比如地毯毛长了、地板有水)就可能摔跤。我朋友的机器人在他家木地板上走得好好的,去我家瓷砖地就打滑,还得优化算法。
- 安全问题:万一机器人失控撞了老人小孩咋办?现在还没靠谱的安全标准。
不过趋势是好的:模块化设计(零件坏了能换)、标准化接口(不同品牌零件通用)、AI大模型加持(更聪明)。特斯拉说要2025年量产Optimus,目标价2万美元,我觉得有点乐观,但5年内家用机器人进中产家庭,应该不是梦。
最后说两句
看完浙大这篇综述,我最大的感受是:人形机器人不再是科幻片里的玩意儿了。从机械结构到AI大脑,每个技术模块都在快速突破。当然,现在还没到"机器人管家"的阶段,但就像10年前智能手机刚出来时谁也想不到现在的功能一样,人形机器人的爆发可能比我们想象的快。
你觉得5年后家里会有机器人帮忙做饭、打扫卫生吗?反正我挺期待的——到时候我就能彻底告别洗碗了!(前提是它别把我珍藏的碗摔了)
论文原文链接:https://onlinelibrary.wiley.com/doi/10.1002/smb2.12008(感兴趣的技术党可以自己去啃,友情提示:有点厚,我花了3天才看完)